def balls_sdf(balls, p, ball_r=0.5):
dists = norm(p-balls.pos)-ball_r
return dists.min()
p = jax.random.normal(key, [1000, 3])
print( jax.vmap(partial(balls_sdf, balls))(p).shape )
show_slice(partial(balls_sdf, balls), z=0.0);
(1000,)
Alexander Mordvintsev | Google | September 23, 2022
Recently I was using JAX to model a few particles moving and interacting in 3D space. Naturally, at some point I wanted to see the behavior of these particles along with some information about their state and interactions with my own eyes. Visualization options available to a researcher are plentiful today, but in the spirit of minimalism I decided to build a visualization with the same tools I was using to make the model. What surprised me was: the effort it took to get a reasonable 3D rendering and the amount of code I had to write was comparable to the amount of code needed to integrate a traditional graphics framework. In principle, I got a working tool for simple 3D scene visualization.
The rendering approach I took is based on raycasting Signed Distance Fields (SDF). Inigo Quilez popularized this approach and made ShaderToy, a thriving creative community of GPU shader developers. Neural Rendering Fields and Differentiable Rendering brought these ideas into machine learning world. There are a number of good SDF tutorials on the internet, including a blog post by Eric Jang, who also used JAX. I recommend having a look at them to get the basic understanding of SDF raycasting before reading further. In this tutorial I'd like to make emphasis on the simplicity and flexibility of using this approach in practice.
The scenes we’ll render consist of a few colored balls. I'm very excited about the underlying experiments which I originally set out to visualise, but that work is not yet ready for the publication, so let's generate some random dummies instead 😉
import jax
import jax.numpy as jp
class Balls(NamedTuple):
pos: jp.ndarray
color: jp.ndarray
def create_balls(key, n=16, R=3.0):
pos, color = jax.random.uniform(key, [2, n, 3])
pos = (pos-0.5)*R
return Balls(pos, color)
key = jax.random.PRNGKey(123)
balls = create_balls(key)
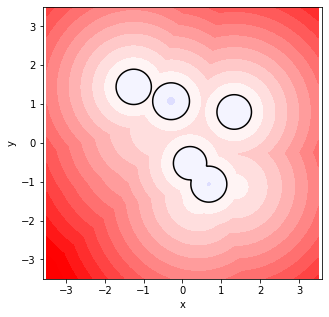
Now we can define an SDF-function. For a given point p it returns a lower bound of the distance to the scene surface, positive for points outside of objects and negative inside. The function below computes distances from a given location to all balls and returns the minimum distance. We can use jax.vmap to sample many different locations in parallel, for example to quickly render 2D slices of a 3D SDF (see the show_slice function in the notebook linked at the top of the page). Other helper functions I'll use in this tutorial are L2-norm computation (norm and normalize) and animate to generate videos.
def balls_sdf(balls, p, ball_r=0.5):
dists = norm(p-balls.pos)-ball_r
return dists.min()
p = jax.random.normal(key, [1000, 3])
print( jax.vmap(partial(balls_sdf, balls))(p).shape )
show_slice(partial(balls_sdf, balls), z=0.0);
(1000,)
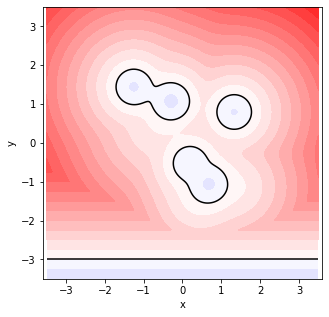
SDF raycasting makes it easy to achieve effects that are non-trivial to implement with traditional methods. For example, I would like to merge nearby balls to emphasize their interaction (the effect known as metaballs). With polygonal graphics this would require triangulating the isosurface (e.g. using marching cubes algorithm), but here we can smooth the balls by simply replacing the min function with a variant of softmin (decreasing the parameter c makes smoothing stronger). Also I added a floor to the scene:
def scene_sdf(balls, p, ball_r=0.5, c=8.0):
dists = norm(p-balls.pos)-ball_r
balls_dist = -jax.nn.logsumexp(-dists*c)/c # softmin
floor_dist = p[1]+3.0 # floor is at y==-3.0
return jp.minimum(balls_dist, floor_dist)
show_slice(partial(scene_sdf, balls), z=0.0)
Raycasting SDFs is very easy to implement. Given a starting point p0 and a unit-length ray direction dir we make a series of jumps, where the length of each jump equals the minimum distance to the surface. The function below returns the point that the ray reaches after step_n iterations. This point is supposed to be close to the scene surface for rays that hit it, and somewhere far away from the scene for rays that miss the surface.
def raycast(sdf, p0, dir, step_n=50):
def f(_, p):
return p+sdf(p)*dir
return jax.lax.fori_loop(0, step_n, f, p0)
You may notice that I'm using jax.lax.fori_loop instead of a python loop. Otherwise, applying @jax.jit decorator to this function would cause the loop body, including all nested calls, to be unrolled step_n times. This would substantially slow down the compilation, and might be the reason for very long compilation times reported in this post.
Another important limitation is the fixed number of loop steps. Unfortunately, JAX doesn't allow dynamic loops in jitted code (and later we’ll see that jit is really worth it when it comes to improving the rendering performance). In practice, some rays are going to escape the scene quickly, while others will quickly reach the surface. Only a fraction of surface-tangent rays would need that many steps. In GPU shader programming, groups of nearby rays are batched into blocks that are scheduled independently. Threads may have dynamic stopping conditions, so some blocks may finish earlier, releasing resources to work on slower blocks. The NumPy-inspired JAX (also TF and PyTorch) programming model is much less flexible in this regard.
Now when we can cast individual rays, we need to create a ray for each image pixel and cast them all together. camera_rays function calculates ray vectors given the camera direction, view size and field-of-view parameter.
world_up = jp.array([0., 1., 0.])
def camera_rays(forward, view_size, fx=0.6):
right = jp.cross(forward, world_up)
down = jp.cross(right, forward)
R = normalize(jp.vstack([right, down, forward]))
w, h = view_size
fy = fx/w*h
y, x = jp.mgrid[fy:-fy:h*1j, -fx:fx:w*1j].reshape(2, -1)
return normalize(jp.c_[x, y, jp.ones_like(x)]) @ R
w, h = 640, 400
pos0 = jp.float32([3.0, 5.0, 4.0])
ray_dir = camera_rays(-pos0, view_size=(w, h))
sdf = partial(scene_sdf, balls)
hit_pos = jax.vmap(partial(raycast, sdf, pos0))(ray_dir)
imshow(hit_pos.reshape(h, w, 3)%1.0)
Hooray, we can already see something! Ray endpoints are stored in the hit_pos array and the image above shows fractional parts of their XYZ coordinates as RGB colors.
Our visual system is very good at estimating the shape of objects from the interplay of light and shadows, so shading is an important part of visualization. Whatever shading model we decide to apply, we have to know the surface normals in order to estimate how much light it receives and reflects. Luckly, SDFs and automated differentiation give us an easy way to get them: the normal is the gradient of the SDF function.
raw_normal = jax.vmap(jax.grad(sdf))(hit_pos)
imshow(raw_normal.reshape(h, w, 3))
You may notice that I saved the SDF gradient as raw_normal. The gradient of a perfect SDF function is a unit-length vector orthogonal to the isosurface at the current point. Our SDF is a little bit “imperfect” because of the ad-hoc smoothing with the soft-min function, which can make the gradient norm smaller than one in some areas. Shall we just correct this imperfection by "normalizing" normals and move on? There's something more interesting we can do! Let's look at the norms of our gradients:
imshow(norm(raw_normal).reshape(h, w))

Gradient norms are smaller at concave areas of the surface. In real life, we have a phenomenon, that concave areas receive less ambient light because of occlusion, or are less shiny because they accumulate more dust over time. This gives a strong cue to our visual system, and the artifact of normal estimation gives us a way to approximately simulate this effect almost for free!
Direct light shadows are another important depth cue. We can simulate them by casting secondary rays from the surface towards the light source. Using SDFs we can even fake soft shadows with a single raycast. Please refer to this great blog post by Inigo Quilez for the details.
def cast_shadow(sdf, light_dir, p0, step_n=50, hardness=8.0):
def f(_, carry):
t, shadow = carry
h = sdf(p0+light_dir*t)
return t+h, jp.clip(hardness*h/t, 0.0, shadow)
return jax.lax.fori_loop(0, step_n, f, (1e-2, 1.0))[1]
light_dir = normalize(jp.array([1.1, 1.0, 0.2]))
shadow = jax.vmap(partial(cast_shadow, sdf, light_dir))(hit_pos)
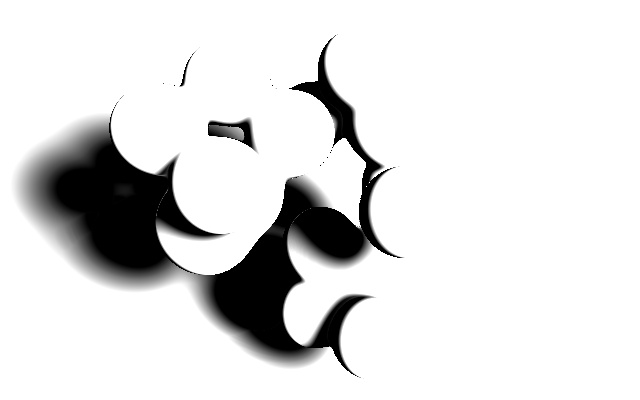
imshow(shadow.reshape(h, w))
Now let's apply all lighting components, including the classical Blinn–Phong shading model. Note gamma correction which is too often omitted even in professional software.
def shade_f(surf_color, shadow, raw_normal, ray_dir, light_dir):
ambient = norm(raw_normal)
normal = raw_normal/ambient
diffuse = normal.dot(light_dir).clip(0.0)*shadow
half = normalize(light_dir-ray_dir)
spec = 0.3 * shadow * half.dot(normal).clip(0.0)**200.0
light = 0.7*diffuse+0.2*ambient
return surf_color*light + spec
f = partial(shade_f, jp.ones(3), light_dir=light_dir)
frame = jax.vmap(f)(shadow, raw_normal, ray_dir)
frame = frame**(1.0/2.2) # gamma correction
imshow(frame.reshape(h, w, 3))
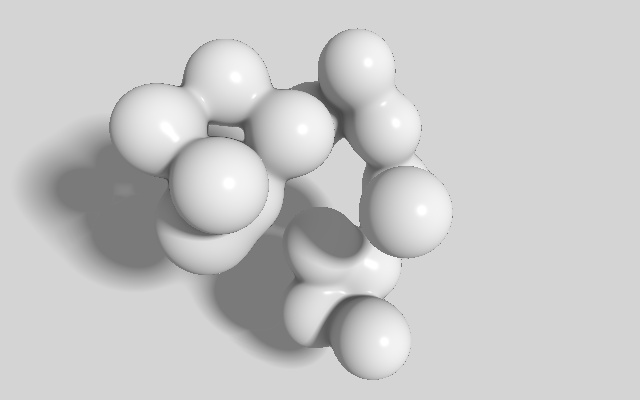
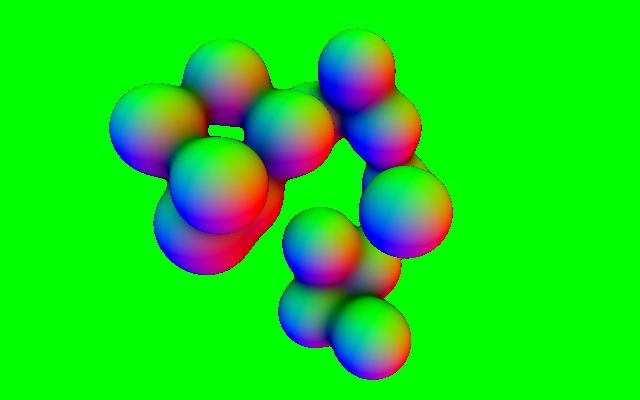
For now, all surfaces in our scene have a uniform white color, but shading allows us to interpret 3D geometry from a 2D image. Let's now add some colors and simple textures. I modified the scene function to have a special mode where it also returns the surface color. The function computes colors for both balls and the surface, and then uses jp.choose to select the color for the current pixel. The overhead for computing both colors is negligible because we use this mode only once per ray (versus the sdf-only mode, which we evaluate 50 times for primary and 50 times for shadow rays).
def scene_sdf(balls, p, ball_r=0.5, c=8.0, with_color=False):
dists = norm(p-balls.pos)-ball_r
balls_dist = -jax.nn.logsumexp(-dists*c)/c
floor_dist = p[1]+3.0 # floor is at y==-3.0
min_dist = jp.minimum(balls_dist, floor_dist)
if not with_color:
return min_dist
x, y, z = jp.tanh(jp.sin(p*jp.pi)*20.0)
floor_color = (0.5+(x*z)*0.1)*jp.ones(3)
balls_color = jax.nn.softmax(-dists*c) @ balls.color
color = jp.choose(jp.int32(floor_dist < balls_dist),
[balls_color, floor_color], mode='clip')
return min_dist, color
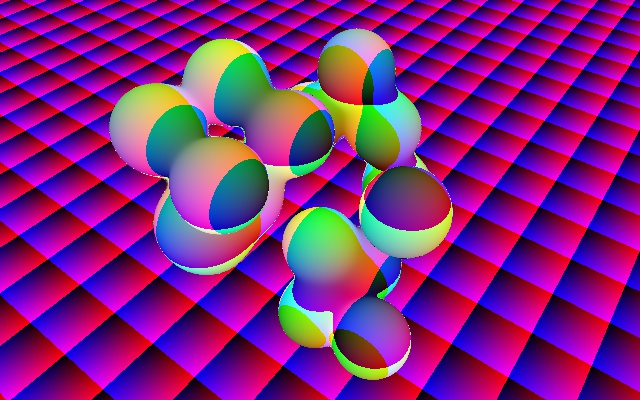
color_sdf = partial(scene_sdf, balls, with_color=True)
_, surf_color = jax.vmap(color_sdf)(hit_pos)
f = partial(shade_f, light_dir=light_dir)
frame = jax.vmap(f)(surf_color, shadow, raw_normal, ray_dir)
frame = frame**(1.0/2.2) # gamma correction
imshow(frame.reshape(h, w, 3))
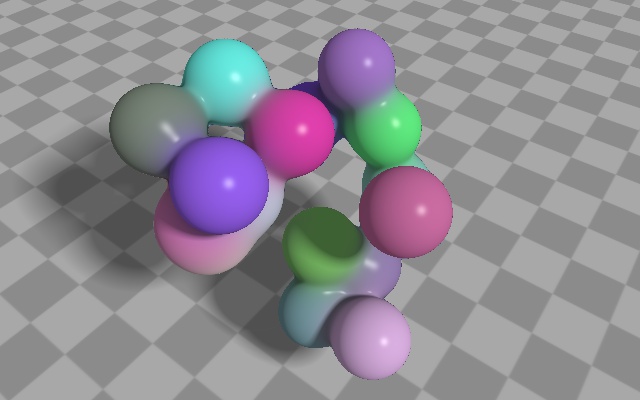
That's it! With a moderate amount of code we got a shaded and colored scene. We rendered a single frame so far, but to create an animation we need to think about performance. JAX code can be made faster by using @jit decorator, which analyzes the flow of execution and generates the optimized code. Let's put everything together and JIT:
def _render_scene(balls,
view_size=(640, 400),
target_pos=jp.array([0.0, 0.0, 0.0]),
camera_pos=jp.array([4.0, 3.0, 4.0]),
light_dir=jp.array([1.5, 1.0, 0.0]),
sky_color=jp.array([0.3, 0.4, 0.7])):
sdf = partial(scene_sdf, balls)
normal_color_f = jax.grad(partial(sdf, with_color=True), has_aux=True)
light_dir = normalize(light_dir)
def render_ray(ray_dir):
hit_pos = raycast(sdf, camera_pos, ray_dir)
shadow = cast_shadow(sdf, light_dir, hit_pos)
raw_normal, surf_color = normal_color_f(hit_pos)
color = shade_f(surf_color, shadow, raw_normal, ray_dir, light_dir)
escape = jp.tanh(jp.abs(hit_pos).max()-20.0)*0.5+0.5
color = color + (sky_color-color)*escape
return color**(1.0/2.2) # gamma correction
ray_dir = camera_rays(target_pos-camera_pos, view_size)
color = jax.vmap(render_ray)(ray_dir)
w, h = view_size
return color.reshape(h, w, 3)
render_scene = jax.jit(_render_scene)
print('Compilation time:')
frame=%time render_scene(balls).block_until_ready()
imshow(frame)
Compilation time: CPU times: user 1.33 s, sys: 16.2 ms, total: 1.35 s Wall time: 1.27 s
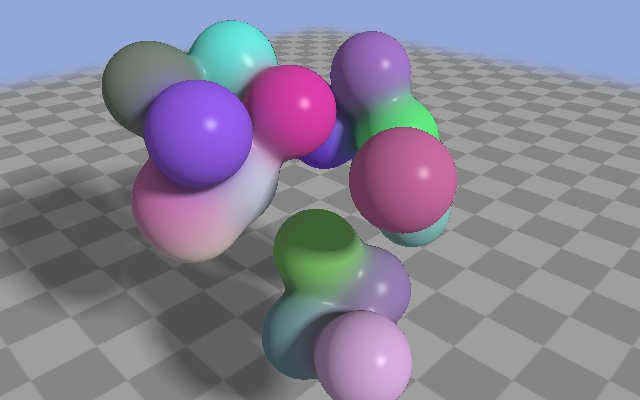
The nested render_ray function computes the color of an individual pixel, so vmap is only applied once at the highest level. Rays that escape the scene are now colored with sky_color. I tried to use jax.lax.cond to skip shading these rays with conditional evaluation, but the performance I got (even for frames where most rays escaped) was even slightly worse than just evaluating everything and using algebra to select the resulting color. JAX seems to execute both branches, which, along with the fixed number of steps per ray, is another limitation of tensor-granular API.
The first call to render_scene triggers JIT compilation, which takes around a second (wall time). Note that using fori_loop is critical to keep compilation times low. Using a python loop makes compilation ~10x slower.
Performance measurements of the original and the jitted function on a Colab Pro kernel can be seen below. I randomize ball positions each call to make sure that rendering results are not cached somewhere (doesn't seem to make any difference, but just in case).
def random_balls():
key = jax.random.PRNGKey(np.random.randint(1e6))
return create_balls(key)
!nvidia-smi -L
print('\nNo JIT render time:')
%timeit _render_scene(random_balls()).block_until_ready()
print('\nJIT render time:')
%timeit render_scene(random_balls()).block_until_ready()
GPU 0: Tesla V100-SXM2-16GB (UUID: GPU-93287726-bf2c-4c83-523a-c79a19482475) No JIT render time: 594 ms ± 7.07 ms per loop (mean ± std. dev. of 7 runs, 1 loop each) JIT render time: 15.3 ms ± 70.3 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
We can see that JIT-compilation makes rendering a few tens of times faster! It is definitely worth the effort to make the code jit-compatible even if it means using fixed-size arrays and less convinient flow control. Our renderer can produce small frames (640x400) at interactive frame rates, so it shouldn't take long to generate an animation using the code we wrote. It would have been even faster if we were using GPU shader languages (e.g. GLSL) instead of JAX, because that would allow to terminate some rays early and release resources to work on harder rays.
Nevertheless, the approach described here has the benefit of using the same tools that are typically used to train differentiable models, so is perfectly viable e.g. for debugging and monitoring the training progress of simple particle systems. Let's make a little animation now.
%%time
pos = jp.float32([[1, 0], [0, 1], [2, 1], [2, 2.5],
[4, 0], [4, 1.4], [5, 2.5], [6, 0], [6, 1.4],
[8, 0], [10, 0], [9, 1.2], [8, 2.4], [10, 2.4]])*0.7
color = jp.float32([[0.1,0.3,0.9]]*4 + [[0.01,0.4,0.3]]*5 + [[0.8,0.2,1.0]]*5)
pos = jp.c_[pos-pos.ptp(0)/2, 0.0*pos[:,:1]]
s0 = dict(
balls=Balls(pos, color),
camera_pos=jp.array([0.0,2.0, 7]),
light_dir=jp.float32([1, 1, 1]))
keys = iter(jax.random.split(key, 10))
s1 = dict(
balls=create_balls(next(keys), len(pos), R=10.0),
camera_pos=jp.array([-15.0,8.0, -10]),
light_dir=jp.float32([-5, 1, -1]))
s2 = dict(
balls=create_balls(next(keys), len(pos), R=10.0),
camera_pos=jp.array([15.0,9.0, -10]),
light_dir=jp.float32([-3, 1, 1]))
def cubic(t, a, b, c, d):
s = 1.0-t
return s*s*(s*a + 3*t*b) + t*t*(3*s*c + t*d)
def render_frame(t):
t = t*t*(3-2*t) # easing
s = jax.tree_map(partial(cubic, t), s0, s1, s2, s0)
return render_scene(**s)
animate(render_frame, 10)
CPU times: user 12 s, sys: 1.41 s, total: 13.4 s Wall time: 16.8 s
The code above uses jax.tree_map to conveniently interpolate between nested data structures that contain information about the scene, including light and camera position.
Rendering a 10 second 60 fps animation takes from ~20 to less than 10 seconds depending on the available GPU (I tried V100 and A100, also running the first time in a Colab session takes a bit longer). Not bad for a ~100 lines of code engine built from scratch on top of the generic array processing language.
Oh, and did I mention that all JAX autodiff and vectorization goodies are still applicable? For example, nothing stops us from using forward AD to compute temporal derivatives of pixel color values, and then use them to make linear approximations of video frames around a particular moment of time. Note how adding and subtracting derivatives creates the illusion of motion, especially around specular highlights.
img, dimg = jax.jvp(render_frame, (0.005,), (0.5,))
animate(lambda t: img+jp.sin(8*t*jp.pi)*t*dimg, 3)
I hope you enjoyed this little tutorial. Demosceners and shader developers probably wouldn't be impressed, but I hope it makes more ML developers aware of some less usual applications and capabilities of their tools.
Below you can find a few pointers to resources related to SDF ray tracing and Differentiable Rendering (and searching for these terms would give you many more).
I'd like to thank my colleagues Johannes Oswald, Eyvind Niklasson and Ettore Randazzo for feedback and proofreading.